团队介绍:
复杂智能网络团队负责人是控制理论与控制工程学科负责人李智教授。团队现有导师三名,其中博士生导师一人,硕士生导师两人,现有博士研究生3名,硕士研究生18名。团队研究方向包括复杂多智能网络协同控制理论与应用、群体智能决策与优化、深度学习、复杂网络上共演化博弈动力学、目标跟踪与博弈控制、雷达数据处理与融合,复杂系统估计理论、网络安全量子协议等。团队具有完善的复杂网络研究的软硬件平台,承担国家级/省部级纵向项目及科研院所横向课题多项,与国外多所著名学府/研究机构开展一年以上的学术访问与交流合作,在控制领域高水平期刊及会议发表论文近百篇。团队已毕业博士、硕士研究生40余名,许多优秀毕业生就业于国内双一流大学、重点科研院所、电子信息行业知名企业等,为国家和社会发展做出了贡献。
研究方向:
1. 复杂多智能网络协同控制理论与应用。群体智能决策与优化,深度学习理论与应用,多无人机、无人车、机器人协同控制。

无人机群和无人车队协同

机械臂抓取目标物体
2. 复杂网络上共演化博弈动力学。复杂动态过程的协同演化,典型多层网络相互依存关系的建模与分析,基于博弈及复杂网络理论的社交活动分析与可视化,网络化系统的群体智能与决策。

自然界中的群体智慧
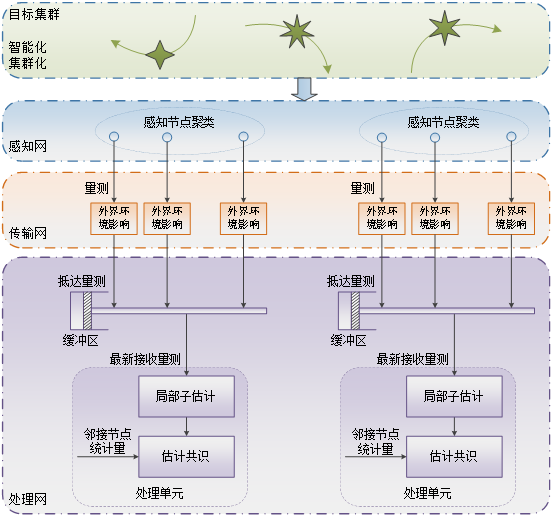
3. 目标跟踪与博弈控制,雷达数据处理与融合,复杂系统估计理论。
主要成果概况:
团队目前有无人机、无人车协同控制软硬件验证平台、复杂网络的软件分析平台。近年来承担国家重大科技专项,国家自然科学基金面上/青年项目,中国博士后基金、教育部博士点基金、国家重点实验室基金、陕西省基金、科研院所横向课题等。发表包括高被引ESI论文(1篇)、Automatica、International Journal of Robust and Nonlinear Control、Information Science,Applied Mathematics and Computation, New Journalof Physics, Physical Review E, Europhysics Letters, Chaos等高水平论文近百篇,单篇论文SCI他引170余次。培养的员工获得省级优秀博士论文、校级优秀博士论文等奖励。

无人机平台

机械臂平台
团队联系方式:李老师zhli@xidian.edu.cn

